java信号量的简单了解
在Java语言里面,Semaphore 的作用是可以控制对于同一个临界资源,允许多少个线程同时执行。
当线程执行到临界区域的时候,需要先向 Semaphore 申请一个令牌,此时 Semaphore 会判断现有的的令牌是不是小于0,如果小于0,则阻塞当前线程,直至有线程将令牌归还回来。
申请到了permits
如果一个线程直接申请到了permits,则是直接通过CAS操作将 state 减一即可,然后线程继续执行。
无法申请到permits
当无法申请到 Semaphore 的 permits 的时候,则会将当前的线程进行阻塞,直到有线程执行完毕,释放了 permit。
Semaphore 的类关系
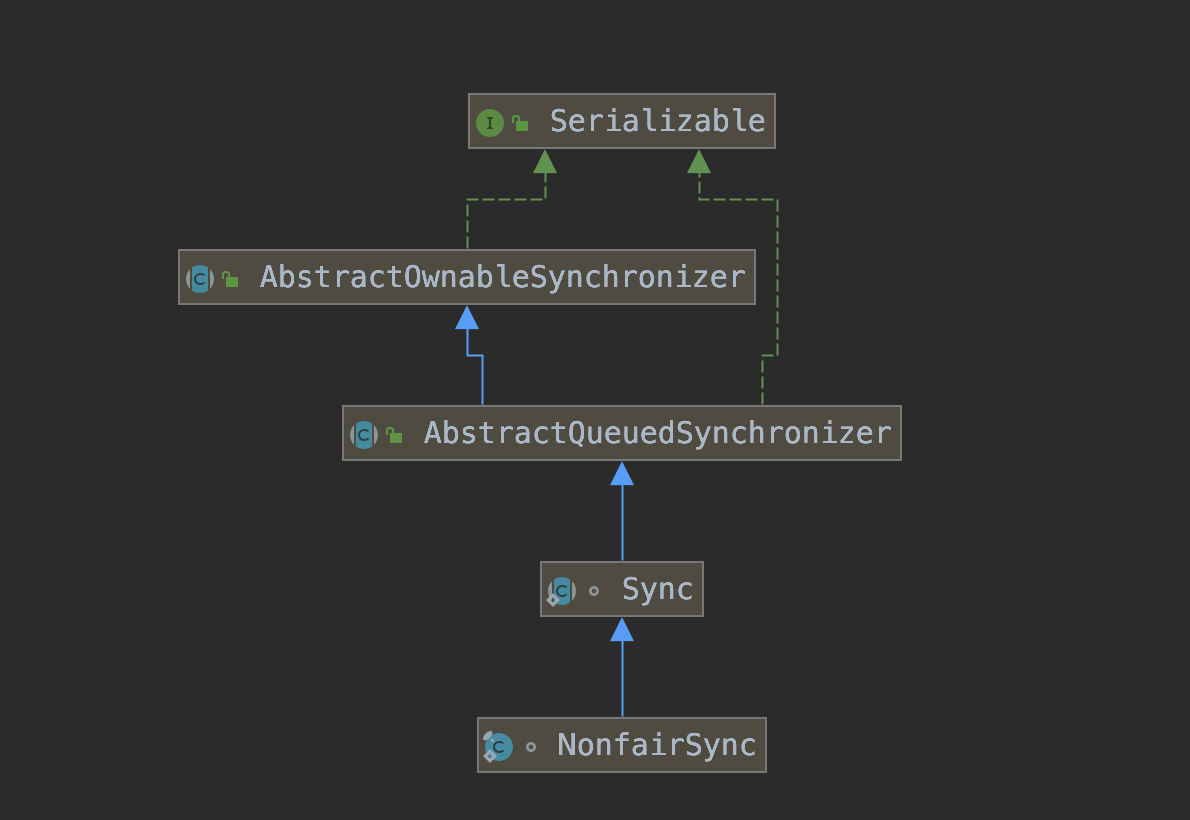
那么在 Semaphore 里面,如果 permits 已经被降到0以下,按照信号量的规则,应当将当前线程阻塞,直到 permits 大于 0。查看 Semaphore 的类组织结构,会发现它的一些操作全部都是依赖于自己的一个 Sync 变量,此外还有两个变量用于实现公平锁和非公平锁,都是继承自 Sync,而 Sync 则是继承自 AbstractQueuedSynchronizer (下文简称AQS)。所以 Semaphore 的实现全部是依赖于 AQS。
以下为 Semaphore 的类图:
下面是一个例子来说明 Semaphore 是如何工作的。
如下Demo
1 | public class SemaphoreTest implements Runnable { |
在这个例子中,首先获取到 permits 的线程会执行,而第二个线程则会被阻塞,直到 permits 被释放。这也是 Semaphore 的目的,控制有多少个线程可以同时的访问某一个资源。
设置permits
在 Semaphore 里面,直接使用 AQS 里面的state变量来决定允许多少个线程同时访问一个资源,通过 Semaphore 的构造函数就可以发现:
1 | public Semaphore(int permits) { |
该super就是调用 Sync 的构造函数,然后调用 AQS 里面的 setState方法,最后设置 AQS 的 state。
获取permits
当一个线程尝试调用 acquire 方法的时候,最终会通过 NonfairSync 的 tryAcquireShared 方法,在该方法里面,会获取当前线程的 state,然后减去入参带过来的参数(默认是 1 ),最后判断是否小于 0,若大于 0 的话,则直接采用 CAS 的操作将剩余的 state 替换掉。小于 0 的话,直接返回并且会进入另一个方法。
1 | final int nonfairTryAcquireShared(int acquires) { |
由于 state 是由 volatile 修饰的,所以说当一个线程原子性的修改了 state,另一个线程也会立即获取到 state 的最新状态的。
这个方法不是一个原子性的,但是由于 CAS 操作是原子性的,那么最终还是能保证一致性的。如下:
- 如果一个线程在获取到了 available 恰好为 1, 准备减去 1 的时候,此时另一个线程恰好 CAS 执行完毕,将 state 更新为 0 了,此时第一个线程在执行 CAS 的时候,由于 expect 已经修改为 0 了,所以此时 CAS 操作一定不成功。
- 如果在 getState 之前,state 已经被修改成 0 的,那么由于
remaining < 0,所以直接返回 remaining。
线程阻塞
在这里先简单介绍下线程的阻塞方式:
首先生成一个 Node,然后再判断下队列的尾部 tail 是不是为 null,如果是的话初始化 head 和 tail,并且将当前线程的 Node 的前置节点指向 head,然后通过 CAS 操作将 tail 设置为当前线程创建的 node, 最后将 head 的后置节点指向该节点。
然后再判断前置节点是不是 head,是的话就再次尝试获取 state,若获取不到则直接将前一个节点的 waitStatus 修改为 -1(即后置节点的线程需要被唤醒)然后直接通过LockSupport.park(this)将其阻塞。
当 CAS 操作失败,一般都是 state 已经小于 0 了,此时就会进入 doAcquireSharedInterruptibly 方法里面,在该方法里面会使用 AQS 里面的 FIFO 队列,来实现对于临界资源的控制。
详细
Semaphore 首先会进行创建一个 Node,在首次阻塞某一个线程的时候,由于 tail 为null,所以会直接进入 enq 方法,在该方法里面会将 tail 和 head 都设置为一个新的 node,然后展开第二次的循环,最后在将当前线程的 node 的 prev 指向 head,通过CAS操作将 tail 指定为该node,最后将 head 的 next 指向 该node(注意这一步为非原子性的,所以会影响到后面的release方法的一个判断)
1 | private Node addWaiter(Node mode) { |
到这里,一个 FIFO 队列就生成了,此时 head 为一个node(waitStatus为0,next为被阻塞的线程),当从 addWaiter 方法返回的时候,Semaphore 还会进行一个判断,如果当前线程的前置节点是 head,就再次尝试一次获取 state,如果获取不到的话就将前置节点的 waitStatus 设置成 -1,然后通过LockSupport.park(this)将本线程中断,至此该线程被阻塞了。
如果在判断前置节点是 head 之后,然后通过 tryAcquireShared 获取到了 state 那么此时就会调用 setHeadAndPropagate 将自己设置为头节点,同时判断是否需要唤醒后续的节点
释放
假如一个线程执行完毕之后,是会调用 release 方法来释放资源的,首先还是以 CAS 操作原子性的增加 state,
1 | protected final boolean tryReleaseShared(int releases) { |
当 CAS 操作成功之后返回 true,然后调用 doReleaseShared 方法,在该方法里面,会首先将 head 的状态更改为 0,然后然后通过 unparkSuccessor 来唤醒后面的线程,在这里需要注意的是那一个 for 循环里面的代码。
为什么for循环的时候需要从尾节点开始
在这里其实是由于前面在设置尾节点的时候 CAS 虽然是一个原子性操作,但是在 CAS 操作之后,紧跟着 pred.next = node 这一步为非原子性的,所以就导致了有可能从头遍历的时候会断开掉,所以此时就需要从尾节点开始,因为这样一定不会断开的,也是最有保证的。